Image filtering
Contents
Image filtering#
Filtering is a technique for modifying or enhancing an image. For example, we can use it to highlight features and/or remove noise. The basic image filtering operations implemented here are:
smoothing filter (moving average filter)
sharpening filter
edge detection
Filtering is a neighbourhood operation, in which the value of the pixel in the output image is determined by applying some alogrithm to the values of the pixels in the neighbourhood of the corresponding input pixel. All of the examples found below are linear filtering operations in which the value of an output pixel is a linear combination of the values of the pixels in the input pixels neighbourhood.
What we aim to achieve is to have a moving window across our image which calculates an average of the values of the input image within the window for the central pixel. This smoothens the contrast between pixels.
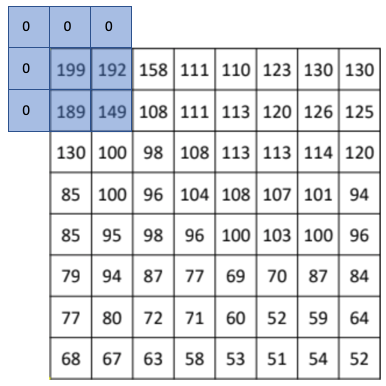
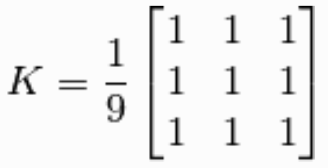
This can be acccomplished through convolution, which is a neighbourhood operation in which each output pixel is the weighted sum of neighbouring input pixels. The matrix of weights is called the convolution kernel, below we show a \(3\times3\) kernel that we will use for our moving average filter:
To prevent against empty values at the edges of the image we can use padding, for instance we can place zero values in these cells or mirror the available values within our window. If this is not done and we ignore the edge pixels we will reduce the size of our image.
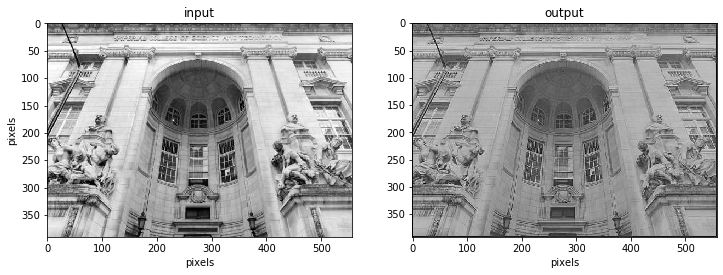
Moving average filter#
It takes M samples of input at a time and takes the average of that subset of data to produce a single output point, in statistics commonly named moving/rolling mean. As it is averaging the neighbouring pixels we are reducing the contrast between pixels and hence smoothening the image. An example of this is demonstrated below.
# Import required libaries
import imageio
import numpy as np
import matplotlib.pyplot as plt
import scipy
import scipy.signal
import math
import time
# Read in image
img = imageio.imread('Data_Image_Filtering/output-onlinejpgtools.jpg')
# find image dimensions
print('Image dimension =', img.shape)
# Take weighted average of 3 layers to make 1 layer gray scale
image = np.uint8((0.2126 * img[:,:,0]) + np.uint8(0.7152 * img[:,:,1]) + np.uint8(0.0722 * img[:,:,2]))
print('Image dimension =', image.shape)
# To maintain orignal RGB properties apply filter to each
# layer individually instead of averaging them
Image dimension = (390, 556, 3)
Image dimension = (390, 556)
# Display the result, function used throughout
plt.title('input image')
plt.ylabel("pixels"), plt.xlabel("pixels")
plt.imshow(image, cmap='gray')
plt.gcf().set_size_inches(8, 11)

# Design the kernel h (3x3 filter in this case)
h=(1/9) * np.array([[1,1,1],
[1,1,1],
[1,1,1]])
# Convolve the image with h
image_filtered=scipy.signal.convolve2d(image,h,mode='full',
boundary = 'fill', fillvalue=0)
fig = plt.figure()
fig.add_subplot(121), plt.title('input'), plt.set_cmap('gray')
plt.imshow(image), plt.gcf().set_size_inches(12,14),
plt.ylabel("pixels"), plt.xlabel("pixels")
fig.add_subplot(122) , plt.title('output') , plt.set_cmap('gray')
plt.imshow(image_filtered), plt.gcf().set_size_inches(12,14)
plt.xlabel("pixels")
plt.show()

The kernel can be of any size. Increasing the kernel size will lead to a blurrier image as we averaged over a larger amount of data in each step.
# Design the kernel h (9x9 filter in this case)
h=(1/81) * np.ones([9,9])
image_smooth=scipy.signal.convolve2d(image,h,mode='full',
boundary = 'fill', fillvalue=0)
Sharpening filters#
These filters work in the same fashion except that their kernel aims to increase the contrast between neighbouring pixels. This effect will be most pronounced at the pixels with the largest difference in digital numbers.
A simple Kernel that we can use for this would be:
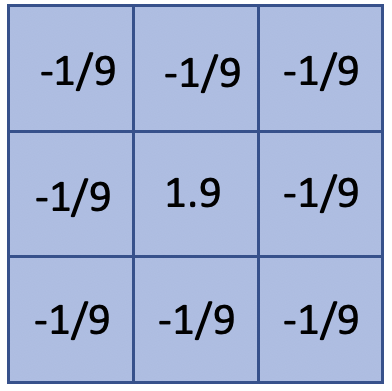
The effect of this filter can be see in the following image:
# Display the change
fig = plt.figure()
fig.add_subplot(121), plt.title('input'), plt.set_cmap('gray')
plt.imshow(image), plt.gcf().set_size_inches(12,14)
plt.ylabel("pixels"), plt.xlabel("pixels")
fig.add_subplot(122) , plt.title('output') , plt.set_cmap('gray')
plt.imshow(image_smooth), plt.gcf().set_size_inches(12,14)
plt.xlabel("pixels")
plt.show()

# Design the kernel h (3x3 filter in this case)
h=np.array([[-1/9,-1/9,-1/9],
[-1/9,1.9,-1/9],
[-1/9,-1/9,-1/9]])
# Convolve the image with h
image_sharp=scipy.signal.convolve2d(image,h,mode='full',
boundary = 'fill', fillvalue=0)
# Display the change
fig = plt.figure()
fig.add_subplot(121), plt.title('input'), plt.set_cmap('gray')
plt.imshow(image), plt.gcf().set_size_inches(12,14)
plt.ylabel("pixels"), plt.xlabel("pixels")
fig.add_subplot(122) , plt.title('output') , plt.set_cmap('gray')
plt.imshow(image_sharp), plt.gcf().set_size_inches(12,14)
plt.xlabel("pixels")
plt.show()
We could do a Linear Contrast enhancement above to see a larger contrast in colours again. See Image Operations notebook
In some cases the filters you will be using can be separated into two smaller filters and convolve these one after the other with our image. for instance:
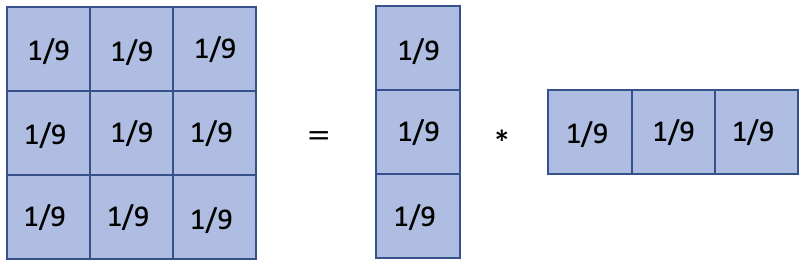
What this achieves is that it can bring down our computational complexity to \(O(N^2 K)\), whereas before it was \(O(N^2 K^2)\)
Edge detection (gradient operators)#
Edges in this context refer to a stark contrast in brightness (DN value) within our image. These can be related to discontinuities in depth, discontinuities in surface orientation (angle), changes in material properties and or variation in scene illumination. These methods are valuable for data extraction in areas such as image processing, computer vision, and machine learning as it allows the extraction of structural properties of an image while reducing the amount of data.
To find these brightness discontinuities derivatives can be used to characterise these as follows
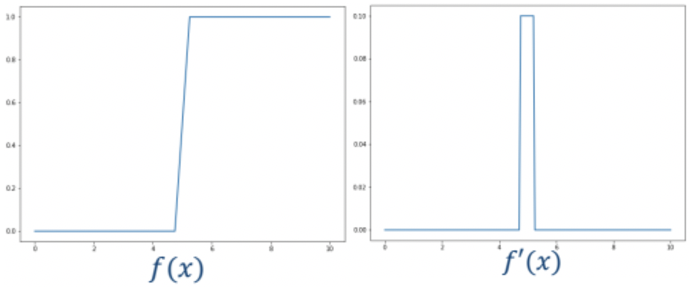
The way to apply this is through finite differencing. We can express this finite differencing in a kernel (h) and convolve this with our image:
forward difference: \(f'[x]= f[x+1]-f[x]\) -> \(h=[1,-1,0]\)
backward difference: \(f'[x]= f[x]-f[x-1]\) -> \(h=[0,1,-1]\)
central difference: \(f'[x]= \frac{f[x+1]-f[x-1]}{2}\) -> \(h=[1,0,-1]\)
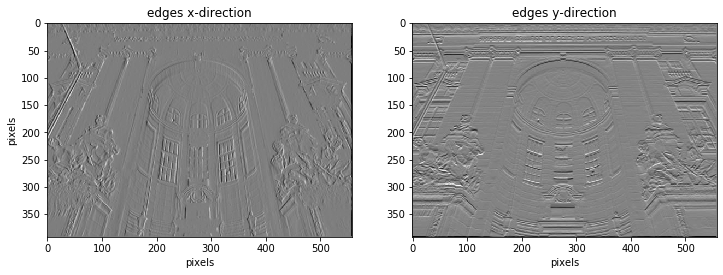
With his we we can design filters such as the Sobel filter which is demonstrated below.
# Design the Sobel filters
h_sobel_x = [[1,0,-1],
[2,0,-2],
[1,0,-1]] # this will be be used to convolve in the x-axis
h_sobel_y = [[1,2,1],
[0,0,0],
[-1,-2,-1]] # this will be used to convolve in the y-axis
# Convolve with Sobel filters
image_filtered_x=scipy.signal.convolve2d(image,h_sobel_x,mode='full',
boundary = 'fill', fillvalue=0)
image_filtered_y =scipy.signal.convolve2d(image,h_sobel_y,mode='full',
boundary = 'fill', fillvalue=0)
# Display results
fig, ax = plt.subplots(1,2,figsize=(12,14))
ax[0].imshow(image_filtered_x, cmap='gray')
ax[0].set_ylabel("pixels")
ax[0].set_xlabel("pixels")
ax[0].set_title("edges x-direction")
ax[1].imshow(image_filtered_y, cmap='gray')
ax[1].set_xlabel("pixels")
ax[1].set_title("edges y-direction")
plt.show()
# Take the magnitude gradient of the two images to join them
mag = np.sqrt(np.square(image_filtered_x) + np.square(image_filtered_y))
# Display the result
plt.title('magnitude')
plt.ylabel("pixels"), plt.xlabel("pixels")
plt.imshow(mag, cmap='gray')
plt.gcf().set_size_inches(8, 11)

# Extract information on the direction of the gradient
directionality = np.arctan2(image_filtered_y,image_filtered_x)
# Display the result
plt.title('directionality of gradient/edge')
plt.ylabel("pixels"), plt.xlabel("pixels")
plt.imshow(directionality, cmap='gist_rainbow')
plt.gcf().set_size_inches(8, 11)
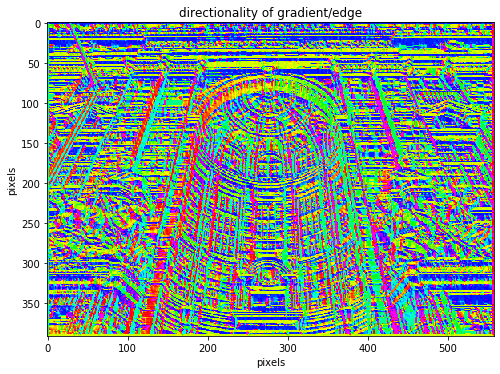
Our edge detection is not perfect as we do not have ideal large steps in brightness on every edge, but more of a transition.
Hence it is not always easy to say that there should be an edge between two pixels or not. One simple step we can take to greatly improve edge detection is smoothening out noise using a gaussian filter for instance. This can become very important when taking second derivatives like the laplacian as derivatives are very sensitive to noise.
References and further reading#
For further reading image filtering and alternative kernels please see:
->En.wikipedia.org. 2020. Kernel (Image Processing). [online] Available at: https://en.wikipedia.org/wiki/Kernel_(image_processing) [Accessed 13 July 2020].
->Uk.mathworks.com. 2020. What Is Image Filtering In The Spatial Domain?- MATLAB & Simulink- Mathworks United Kingdom. [online] Available at: https://uk.mathworks.com/help/images/what-is-image-filtering-in-the-spatial-domain.html [Accessed 13 July 2020].Alternatively here you can find python functions that have the kernel integrated as functions:
->Opencv-python-tutroals.readthedocs.io. 2020. Smoothing Images — Opencv-Python Tutorials 1 Documentation. [online] Available at: https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_imgproc/py_filtering/py_filtering.html [Accessed 13 July 2020].Edge detection and more advanced methods:
->En.wikipedia.org. 2020. Edge Detection. [online] Available at: https://en.wikipedia.org/wiki/Edge_detection [Accessed 13 July 2020].